 Mon catalogue
Mon catalogue 


Un robot industriel, ou une installation robotique, est un système mécatronique polyvalent programmable. Il possède des degrés de libertés qui définissent le nombre de mouvements indépendants qu’il peut effectuer. Généralement les robots possèdent 6 degrés de liberté (ou 6 axes comme pour les machines-outils).
Domaines d'utilisation des robots industriels
Les robots industriels ont plusieurs applications comme par exemple : Les robots de soudure et de peinture, principalement utilisés dans l'automobile. Les robots d'assemblage, très utilisés dans plusieurs industries. Les robots mobiles et autonomes, souvent utilisés pour l'inspection en zone sensible, lorsque l'intervention humaine présente des risques.
Type des robots industriels
On peut classer les robots industriels selon : le type des articulations ou le nombre des axes.
Robots polaires
Ils sont des robots industriels ayant des articulations rotoïde , c'est-à-dire une articulation de type pivot réduisant le mouvement entre deux corps à une rotation autour d'un axe qui leur est commun , permettant de déplacer et d’orienter l'organe effecteur (rappelé aussi préhenseur) dans toutes les directions.
Robots cartésiens

Ils sont des robots industriels ayant des mouvements rectilignes selon les axes du repère cartésien orthogonal (x,y,z) pour le déplacement de l'outil, mais forcément 3 rotoïdes pour l'orienter.
Robot industriel à 6 axes :
3 axes de déplacement, 3 axes de rotation
Robot industriel à 4 axes :
3 axes de déplacement, 1 axe de rotation
Robot industriel à 3 axes :
2 axes de déplacement, 1 axe de rotation
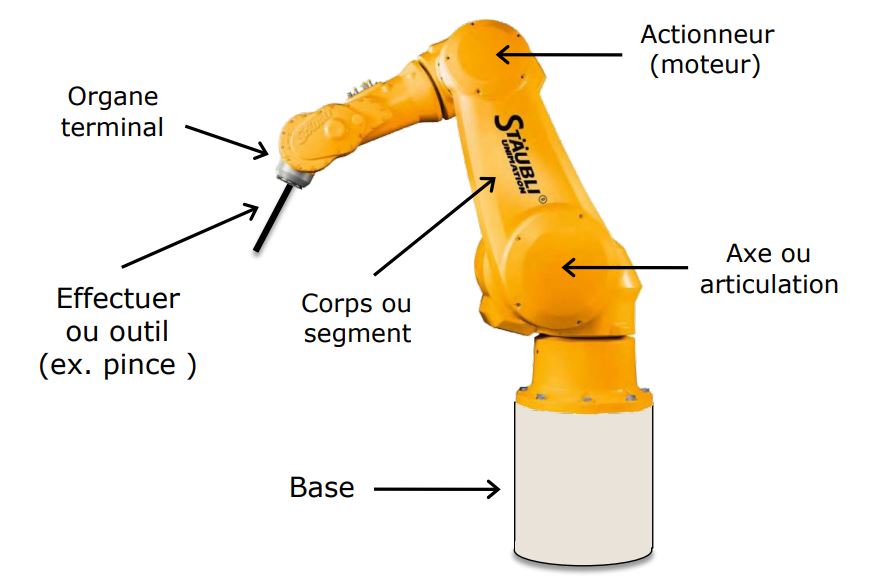
Les éléments des robots industriels
Le robot industriel se compose de :
Structure mécanique : bras robotisé caractérisé par la taille la puissance la vitesse…
L'unité de commande : le cerveau du robot, permet de convertir les consignes reçues en mouvements précis à travers le langage de programmation adéquat.

















 21020
21020  Imen-hmrt
Imen-hmrt 