Mon catalogue
Mon catalogue 

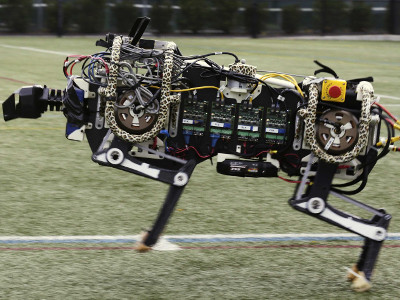
Selon un article publié par machinedesign.com nommé « THE FUTURE OF COLLABORATIVE ROBOTS » dans le chapitre 4 « BIOMECHANICS BRINGS ROBOTICS TO THE MOBILE ERA » qui présente un interview avec Sangbae Kim, professeur à MIT (l’Institut de Technologie de Massachussetts), qui dirige les travaux sur la bio-robotique à travers le projet sur le robot Cheetah (guépard) du MIT, un animal de course et de saut robotisé.
Des essais de recréer le mouvement animal et humain dans le domaine de la robotique.
L’importance de ce sujet par rapport à la robotique actuelle réside dans le faite que lorsque les humains font de la randonnée (changement de pas), nous ne contrôlons pas le placement de nos pieds ou de nos bras avec une précision inférieure au millimètre comme les machines de fabrication. Contrairement aux robots industriels les animaux et l’homme peuvent contrôler le travail négatif qui vous permet d’absorber le choc du sol, donc vous êtes capable de répondre de manière sûre et appropriée à votre environnement. Il est donc nécessaire de faire la repensé sur le système robotique de sorte que vous puissiez effectuer non seulement un travail positif précis et à haute puissance, mais aussi un travail négatif pour interagir dynamiquement avec les environnements.
Les travaux actuels au MIT visent à redéfinir le paradigme de la conception du robot
Selon KIM, le Cheetah (guépard) du MIT est capable de courir jusqu'à 13,5 mph, atteignant une efficacité qui rivalise avec celle de l'animal réel (coût de transport de 0,45, le plus bas de la classe), et tournant et sautant par-dessus un obstacle de 18 pouces. Cette hypothèse a été appliquée à la conception de la jambe du Cheetah du MIT. Selon l'analyse par éléments finis de la conception du Cheetah, la réduction du stress était de 80% à l'essai statique, et de 40% à travers une foulée en marche avec une force de réaction au sol de 550N. Ce principe de conception peut changer le paradigme de conception de la structure robotique et des dispositifs d'assistance humaine où le rapport force-poids est critique. En utilisant des actionneurs proprioceptifs à large bande passante, la quantité d'impulsion verticale à chaque étape est planifiée et exécutée pour correspondre à l'exigence d'impulsion verticale. En conséquence, ils ont pu développé avec succès un algorithme de galop très stable capable de courir jusqu'à 33 mph en simulation et en bordure extérieure du Cheetah du MIT en temps réel.
Comment la bio-robotique peut changer le monde de l'automatisation et des lieux de travail?
Les robots étant de plus en plus mobiles, nous pouvons les utiliser dans des situations de vie ou de mort, pour la livraison de biens et dans des environnements dangereux pour les humains. Par exemple, si nous regardons Fukushima, le site de la catastrophe de la centrale nucléaire au Japon, il y a des zones où les humains ne peuvent toujours pas entrer