يعمل البشر و الروبوتات جنبا الى جنب اكثر من اي وقت مضى بفضل التقدم المحرز في مجال تقنيات السلامة. توفر هذه المعايير الجديدة ارشادات حول طريقة ايجاد فضاءات عمل تعاونية اكثر سلامة من اجل احداث ثورة في الانتاجية و السلامة على مستوى الانتاج الصناعي.
وبفضل التقدم في تكنولوجيا الاستشعار و انظمة الحركة ,تقوم التطبيقات الروبوتية التعاونية بتغيير طريقة تفاعل الاشخاص مع الآلات داخل المصانع. يمكن هذا التعاون المنتجين و المشغلين الصناعيين من الجمع بين افضل ممارسات الانظمة الروبوتية, كقوة و تكرارية الآلات ,مع المرونة ,القدرة على التكيف و الذكاء لدى البشر.
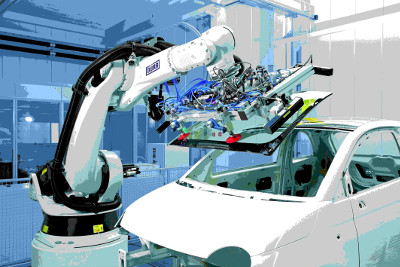
الروبوتات و البشر يتشاركون مساحات العمل التعاونية ذاتها مع ضمان السلامة
النتيجة بيئة عمل تعاونية تقوم بتحسين نجاعة و مرونة الانتاج مع التقليل من العبء الجسدي على البشر. تزداد اهمية هذه التطورات في الانظمة الروبوتية في ظل بحث الشركات عن طرق جديدة للحفاظ على اليد العاملة الكفؤة المترهلة.
احدى العوامل الاساسية في التطبيقات الروبوتية التعاونية تتمثل في تكنولوجيا السلامة التي تسمح للبشر و الروبوتات بتقاسم نفس فضاء العمل مع تقليص خطر تعرض البشر لأي اصابات .و يتم دمج تكنولوجيا السلامة المتقدمة على نحو متزايد في الروبوت وخلية التحكم.
تتمثل طريقة المنطقة الامنية في تحديد المسافة بين المشغل البشري و الروبوت. عند دخول الانسان الى المنطقة الصفراء يقوم الروبوت بتخفيض سرعته و يتوقف تماما عند دخوله المنطقة الحمراء.
توفر اجهزة الاستشعار المتطورة, وحدات التحكم في السلامة و شبكات الاتصال البيانات في الوقت الحقيقي التي تسمح للروبوتات بالاستجابة تلقائيا للحوادث المحتملة ( كملامسة مشغل ) و تقليص الحاجة الى حواجز السلامة ( وبذلك تحرير فضاء العمل, الاقتصاد في الاموال و الزيادة في المرونة في استخدام الروبوتات في المصنع ).
المعايير التي تقدمها اليوم رابطة الصناعات الروبوتية و مختلف منظمات توحيد معايير السلامة تقدم الوصايا حول كيفية امكانية عمل البشر و الروبوتات معا من اجل احداث ثورة في الانتاجية و السلامة في العمليات الصناعية.
ادخال الروبوتية التعاونية حيز التطبيق
لايمكن للروبوت ان يكون تعاونيا بذاته و انما يمثل جزءا من تطبيق روبوتي تعاوني فهو لا يمتثل لقواعد السلامة بذاته. وفقا ل انسي/ريا ر 15.06-2012 و اسو 10218, فان مصطلح الروبوتية التعاونية يصف نظام روبوت تلقائي يتقاسم مساحة العمل مع انسان.
يوجد اربعة انواع من العمليات التعاونية
التوقف تحت الاشراف للسلامة
تقوم اجهزة الاستشعار في نظام مراقبة السلامة بالكشف عن وجود الانسان وتقوم بإيقاف الروبوت مباشرة اذا كان الانسان على مقربة. تستعمل هذه العملية عادة عندما يعمل الروبوتات و البشر على مقربة او عند تداخل فضاءات العمل. يمكن للعامل تحميل اجزاء مباشرة على المنفذ الطرفي للروبوت مع ضمان سلامته. ويمكن ذلك من تحسين الانتاجية حيث يمكن للألة الاستمرار في العمل بشكل مستقل عن الروبوت.
عملية التوجيه اليدوي
تعتبر هذه الطريقة اقل استعمالا من مراقبة السلامة ,و تسمح للمشغلين بالتحكم يدويا او تصحيح مسار الروبوت للمهمة التالية. في هذه الحالة , المشغل على اتصال مباشر مع ذراع الروبوت و يمكنه استعمال الضوابط اليدوية لتصحيح مساره. لكنها ليست الطريقة الامثل للمهمات التي تتطلب السرعة.
مراقبة السرعة و الفصل
تمكن هذه الطريقة الروبوتات و المشغلين من العمل في نفس الفضاء مع المحافظة على المساحة الكافية بينهما. اذا اقترب الانسان من الروبوت ,تقوم انظمة الاستشعار بتفعيل تباطء او وقف الروبوت. يتم الاشارة الى هذه المناطق باللونين الاصفر و الاحمر تبعيا لإبطاء و ايقاف الروبوت. التكنولوجيا الجديدة لأنظمة استشعار السلامة جعلت هذه العملية الاكثر شيوعا في المشغلات الصناعية.
القوة و تقييدها
باستعمال هذا الاسلوب, اذا تلامس روبوت مع بشري فانه يقوم بتقليل قوته او دورانه كي لا يصاب الانسان .تعتبر هذه الفريقة ناشئة وهي الاقل انتشارا. لابد للروبوت من ملامسة الانسان قبل ان يتمكن من التوقف. تطبيق هذا الاسلوب يتطلب دراسة العلاقة بين مختلف مستويات القوة و الالم في جسم الانسان.
توحيد المعايير يبين كيفية تقييم المخاطر على الانسان مع الروبوت
تجرى حاليا دراسات لاستكشاف طريقة الحد من القوة بغاية جعلها ممكنة. على سبيل المثال, معيار ايسو تيسي 15066 يصف نتائج دراسة حول القدرة على تحمل الالم و التي تتضمن لائحة لمستويات القوة و الضغط القصوى لكل جزء من جسم الانسان لمعرفة حدودها القصوى .كما تقدم نصائح حول تقييم المخاطر بالنسبة لكل جزء من جسم الانسان يمكنه ان يتلامس مع روبوت.
معظم هذه الاساليب تهدف الى منع وجود تلامس بين البشر و الروبوتات و الالات,لكن لازال من الضروري اتباع دورة حياة السلامة الوظيفية عند تصميم التطبيقات الروبوتية التعاونية. ايسو 12100 و انسي ب11:0 تحددان دورة حياة السلامة. المرحلة الاولى هي تقييم المخاطر, ثم تحديد المواصفات الوظيفية, استخدام المراقبة الملاءمة و اجراء اختبارات التحقق و التثبت.
تقييم المخاطر
توفر ايسو/تيسي 15066 ارشادات لتصميم فضاءات عمل تعاونية و طريقة اجراء تقييم للمخاطر للتطبيقات الروبوتية التعاونية.وهو تكميل لل ايسو 10218-1 و ايسو 10218-2.بالاضافة الى ذلك ,يقدم ريا تر ر 15-306 منهجية موصى بها للقيام بتقييم المخاطر على اساس المهمات للامتثال لمتطلبات هذه المعايير. التقييم المناسب للمخاطر يحدد جميع الاحتمالات التي يمكن بها ان يتلامس الانسان و البشري, يقيم مستوى الخطر المرتبط به و التخفيض منه عبر الاساليب الملائمة.
مستقبل الروبوتات التعاونية
تمثل زيادة الروبوتات التعاونية حقبة جديدة للعمليات الصناعية. من التعامل مع المهام المتكررة و المهام الثقيلة الى التعامل مع العمليات المعقدة او تلبية متطلبات الجودة الصارمة, تغطي فائدة الروبوتات التعاونية مختلف التطبيقات و الصناعات. إلا ان تحقيق ذلك يتطلب جملة من التغييرات بالنسبة للمهندسين.على مصنعي المواد الاصلية و المستعملين اتباع معايير, أدوات و اساليب جديدة لتقييم المخاطر.المؤسسات التي ستتبنى هذه التغييرات ستكون سابقة لمنافسيها و في مكانة لتحقيق مكاسب انتاجية و فعالية تقدمها الروبوتات مع تحقيق امتثال و سلامة العمال.